参考:
《CUDA 编程:基础与实践》
《GPGPU 异构高性能计算》
GPU 介绍
- 一个典型的 GPU 参数,以 NVIDIA H100 GPU 为例:
- 16896 FP32 CUDA cores;
- 66.9 TFLOPS (FP64 Tensor core);
- 33.5 TFLOPS (FP64);
- 3352 GB/s memory bandwidth;
- 700W TDP;
- TSMC’s 4N customized for NVIDIA;
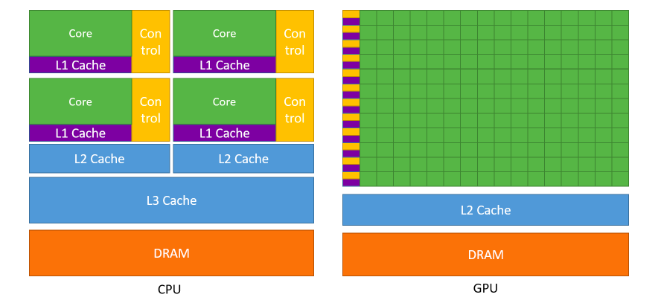
GPU vs CPU:
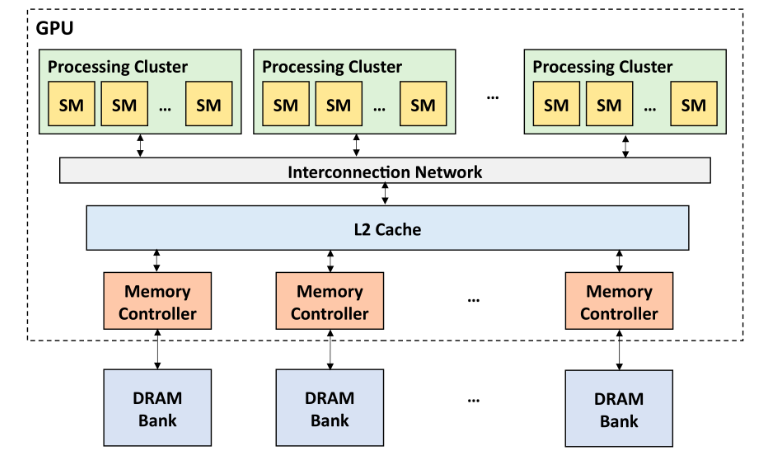
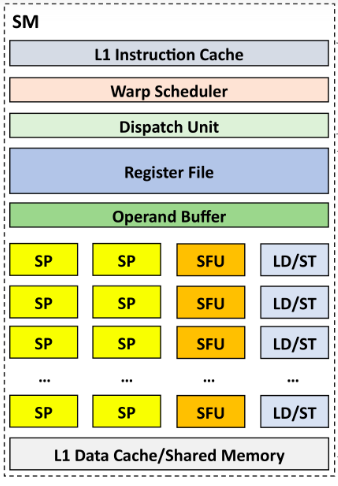
GPU 微体系结构层次(硬件层面):
- 其中 SM 为 Streaming MultiProcessor,SP 为 Streaming Processor;一个 GPU 通常有数百个 SM,每个 SM 有数百个 SP;
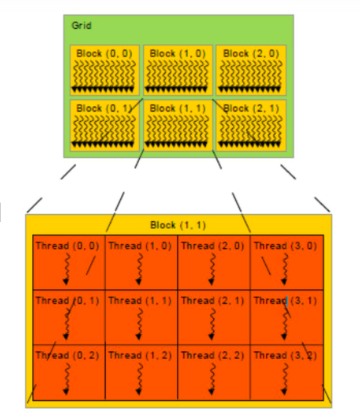
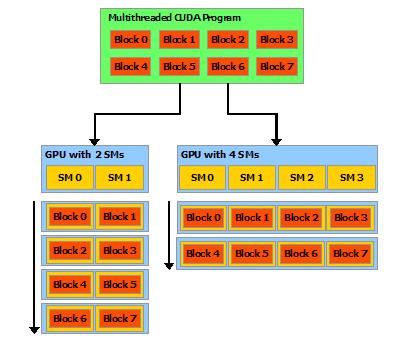
- GPU 程序层次(软件层面):
- 一个程序 kernel 由多个 block 组成,一个 block 由多个 thread 组成;
- 数个 block 分配(映射)到一个 SM 中(block 与 SM 同等大小,某一时刻 SM 中仅存放一个 block);
- 数个 thread 与一个 SP 对应(某一时刻 SP 中仅负责一个 thread),目前一个 block 中最多包含 1024 个 thread;
- 同一个 block 中编号相邻的 32 个 thread 组成一个 warp,被调度器集体调度,通常对程序员透明;
CUDA 入门
- CUDA = Compute Unified Device Architecture,统一计算设备架构,由 NVIDIA 提出的通用并行计算平台和编程模型;Use parallelization to hide the latency;
- 直接使用
nvcc代替g++即可编译(需要后缀名为 .cu),Host Code 将调用 Host C Compiler/Linker,Device Code 调用 Device Just-In-Time Compiler; - 区分:SPMD 编程模型(CUDA、MPI、OpenMP),SIMD 编程模型(Intel MMX、SSE、AVX);
- SPMD 是 GPU 的编程模型,SIMT 是 GPU 的执行方式,SIMD 是 GPU 计算单元的处理方式;
- 一个并行函数是一个 kernel,使用
<<<gridDim, blockDim>>>指定 thread 数目与排布; - host 代表本机,device 代表并行计算设备(GPU):
- host 调用 device 执行,函数加上前缀
__global__(必须返回void); - host 调用 host 执行,函数加上前缀
__host__; - device 调用 device 执行,函数加上前缀
__device__,可以与__host__同时使用,但不能与__global__同时使用;
- host 调用 device 执行,函数加上前缀
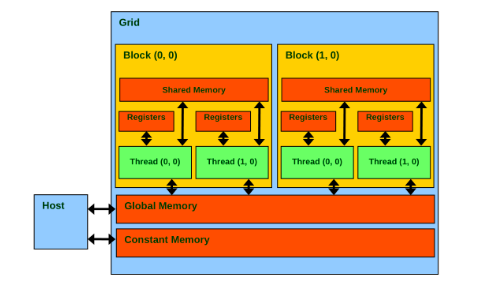
- 内存布局:
- 每个 thread 有自己的寄存器和 local memory;
- 同一个 block 中的 thread 可以通过 shared memory 共享数据,速度类似 L1 Cache;
- 所有 thread 可以通过 global memory 共享数据;
- 另外还有只读的 texture memory 和 constant memory;
- 同一个 block 中 thread 可以通过
__syncthreads()进行路障(Barrier)同步;
- 内存操作:
- 使用
cudaMalloc((void**)&addr, n * sizeof(float))在 device 的 global memory 中分配空间,其中 addr 为float*; - 使用
cudaFree(addr)释放空间; - 使用
cudaMemcpy(h_addr, d_addr, size, cudaMemcpyDeviceToHost)实现 device 与 host 之间的内存拷贝;参数可选cudaMemcpyHostToHost、cudaMemcpyHostToDevice、cudaMemcpyDeviceToHost、cudaMemcpyDeviceToDevice、cudaMemcpyDefault,不符合实际情况将导致错误; - 可以使用
cudaMemcpyToSymbol()和cudaMemcpyToSymbol()在设备与设备静态内存区(定义在核函数之外,使用__device__前缀)之间交换数据,而不使用参数传递; - 均返回一个
cudaError_t,成功时值为cudaSuccess;
- 使用
- 核函数中可以使用的变量:
gridDim.x、blockDim.x、blockIdx.x、threadIdx.x;可以使用dim3 grid_size(3, 3)或dim3 grid_size(1, 2, 3)定义成二维或三维,此时可以使用相应 y 或 z; - 变量声明默认在 register 中,放不下则在 local memory
中,生命周期与访问性均为 thread;加上
__shared__、__device__、__constant__分别分配到 shared memory(生命周期和访问性为 block)、global memory、constant memory 上;
CUDA 进阶
- Memory Coalescing:一次性将同一时刻一个 warp 要访问的内存全部取出;因为这个技术,CPU 的 SIMD 往往一个线程处理的数据是相邻的,而 GPU 中往往不相邻,GPU 中相邻线程处理相邻数据;
- 一个共享内存被分为 32 个 bank,与内建变量 warpSize 值相等;同一线程束内多个线程不同时访问同一个 bank 中不同层的数据,则只需要一次内存事务(memory transaction);
- 原子操作:
AtomicAdd(&a, b); - CUDA 在 host 使用固定内存(调用特殊系统 API,保证不会换出,
cudaMemcpy()速度快一倍,不可过度使用),可以使用cudaHostAlloc(&data, size, cudaHostAllocDefault)或cudaMallocHost(&data, size)和cudaFreeHost(data)操作,与cudaMemcpyAsync()配合,才能达到异步数据传输效果; - 默认流中 host 与 device 的运算是并行的(因此需要核函数结果时应执行
cudaDeviceSynchronize();使用非默认流实现多个核函数并行,以及核函数与数据传递的并行(良好设计下,流越多,并行度越高,直到达到硬件资源上限):
1 | cudaStream_t stream0, stream1; |
- 进行非合并只读读取(即不连续只读读取)global memory
时,会自动使用
__ldg()进行优化; - 统一内存编程:CPU 与 GPU 均可访问,使用
cudaMallocManaged(&data, size, flags = cudaMemAttachGlobal)分配,cudaFree()释放;静态统一内存:在核函数外定义,加上前缀__device__ __managed__; - 统一内存数据预取 API:
cudaMemPrefetchAsync(data, N * sizeof(int), myGpuId, stream); - 统一内存建议 API:
1 | cudaMemAdvise(data, N * sizeof(int), cudamemadvisesetreadmost, cudaCpuDeviceId); |
- 若分支能写成
c = flag ? a : b或if (condition) {...}的形式,则并行性良好,否则then与else的线程之间为串行执行;
CUDA 并行计算模式
- Tile 模式:每次从 global memory 中加载一段到 shared memory,使用 barrier synchronization 进行线程开始与结束同步,再进入下一个 Tile;以矩阵乘法为例,每个 block 负责结果矩阵中的一个子矩阵,每次将计算这个子矩阵需要的部分数据(两个乘数矩阵分别取一块)载入并计算(每个 thread 负责结果子矩阵的一格),下一个 Tile 再取下一批计算此结果子矩阵的部分数据,最后再累加得到最终此结果子矩阵;具体编码较为繁琐;
- Convolution 卷积模式:正常计算,注意处理边界即可;可以使用 Tile;
- Histogram 直方图模式:
for i bin[arr[i]]++;问题,加速技巧:- block_size 设为与 SM 内线程数相等,注意 coalescing;
- shared memory 中做 Atomic 操作速度很快,但 global memory 中很慢;
- 胖内核、contiguous unrolling:循环展开;
- Reduction 规约模式:类 Map Reduce,使用规约树以 log(n) 步执行
Max、Min、Sum、Product 等满足交换结合律的运算;每次循环开始均需要
__syncthreads(); - Scan 前缀和模式:每次迭代
stride *= 2; a[i] += a[i - stride];,需要__syncthreads();更优秀的做法:使用树状数组;
其它
gridDim要足够,通常上取整,因此可能出现最后超出范围的情况,需要判断;- 尽量使用 shared memory,最后返回结果时再使用 global memory;
- 注意栅栏同步函数
__syncthreads()仅能进行同一 block 中 threads 的同步; - 一些常用 CUDA 库(应尽量使用):
- Thrust:类似 C++ STL;
- cuBLAS:线性代数;
- cuFFT:快速傅里叶变换;
- cuSPARSE:稀疏矩阵;
- cuRAND:随机数生成器;
- cuSolver:稠密矩阵与稀疏矩阵;
- cuDNN:深度神经网络;
- 使用 cuda-gdb 调试,nvprof(nsight compute) 测速,nsight system 分析硬件资源占用情况;